最近,我校智能制造技术与装备全国重点实验室张海涛教授课题组在IEEE-TRO(IEEE Transactions on Robotics)上发表了名为“Spontaneous-Ordering Platoon Control for Multirobot Path Navigation Using Guiding Vector Fields”(doi: 10.1109/TRO.2023.3266994, 2023)的长文(Regular paper)。该研究是由华中科技大学研究生胡斌斌、丁佳宁和荷兰格罗宁根大学姚伟嘉博士,在张海涛教授和荷兰格罗宁根大学曹明教授的联合指导下完成的。胡斌斌博士是第一作者,张海涛教授和曹明教授是通讯作者。
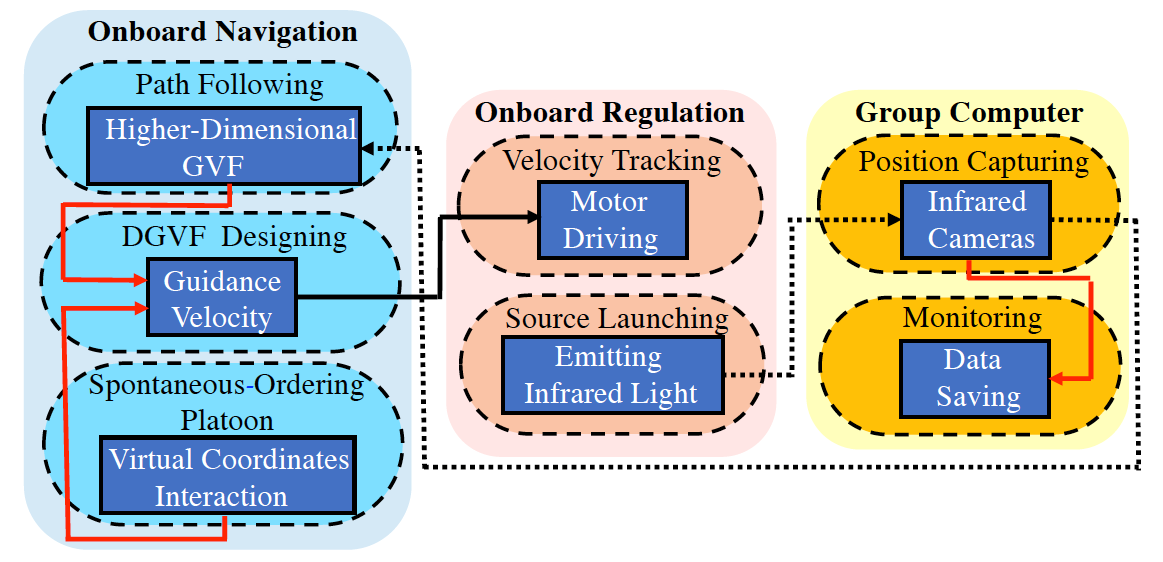
该论文探讨了如何设计导引向量场,以实现无人艇集群在任意维度下的协同路径导航任务中的自发顺序队列控制,从而适应灵活多变的复杂水域环境。论文通过引入自然界生物集群用到的升维导引向量场,消除了奇异点并实现了机器人的期望路径跟踪;结合邻居个体的虚拟坐标吸引和排斥机制,实现了更为灵活的无人艇集群自发顺序队列控制。运用实验室自主搭建的自主无人艇集群测试平台,开展了水面协同控制实验,验证了所提出算法的有效性。该论文揭示了自然界集群的运用导引向量场涌现出高度协同集群行为的规律,并成功应用于自主无人艇集群水域作业协同,为我校和本国重在自主无人系统集群协同前沿研究方向做出了重要贡献。本论文受到丁汉院士主持的国基金科学中心项目61803166,和张海涛教授主持的国家杰出青年基金62225306、国家2030新一代人工智能重大项目2022ZD0119600等资助。
 微信公众号
微信公众号