2月19日,《自然·通讯》在线刊发了我实验室丁汉院士、吴志刚教授团队关于高性能水面软体推动器的最新研究成果“Stenus-inspired, swift, and agile untethered insect-scale soft propulsors”(Stenus comma启发的迅速、敏捷无缆的昆虫尺度的软体推进器)。博士生柯星星为论文第一作者,吴志刚教授为论文的通讯作者,华中科技大学智能制造装备与技术全国重点实验室为论文第一完成单位。

自然界的生物经过数十亿年的进化和选择,通过其优雅的结构、巧妙的机制和卓越的性能在地球各种环境中取得了空前的成功。这一成功不仅激发了各领域研究人员的灵感,也催生了许多令人兴奋的研究领域和实用产品。在自然界中,有一类隐翅虫(Stenus Comma),当受到天敌威胁时,能够在水面上迅速获得高速度和加速度,从而逃脱危险,如图1。这种行为为昆虫尺度的水面推进器的设计和操控提供了极佳的仿生对象。
图1 隐翅虫迅速逃离天敌的生物行为
研究团队通过系统地解析隐翅虫的跨尺度结构来理解这一现象:i.在宏观尺度上,隐翅虫拥有柔顺灵巧的腹部结构,可用于按需控制活性剂(动力物质);ii.在介观尺度上,其非浸润刚毛结构保证了在水面上的稳定运动;iii.在微观尺度上,大量的导管结构用于液体成分的内部运输。这些跨尺度的结构有助于实现隐翅虫高速、按需的快速驱动行为,如图2。
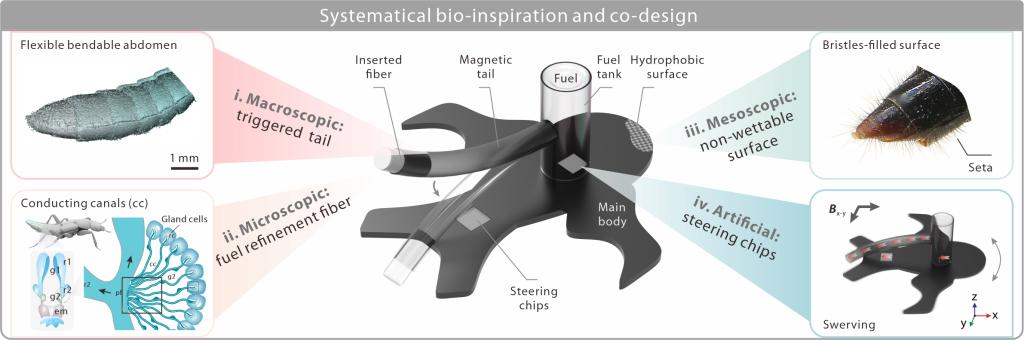
图2 跨尺度的系统级仿生思路
研究团队通过引入软体可实时磁驱尾巴、超疏水表面、尾部各项异性的纤维束等结构,并协同的引入了一对额外的解耦的磁驱“定向芯片”。通过跨尺度系统级仿生和人造结构增强构建了一个昆虫尺度水面推进器(Uni-SoPro),如图3所示。它可以实现在单一3D的可编程磁场(三维赫姆霍兹线圈)驱动下,按需实现极高的加速度(8372 BL/s2)、速度(201 BL/s)和减加速度(-5010 BL/s2)的推进和制动行为。该Uni-SoPro昆虫尺度水面推进器实现了类似的隐翅虫紧急情况下高速逃逸行为。
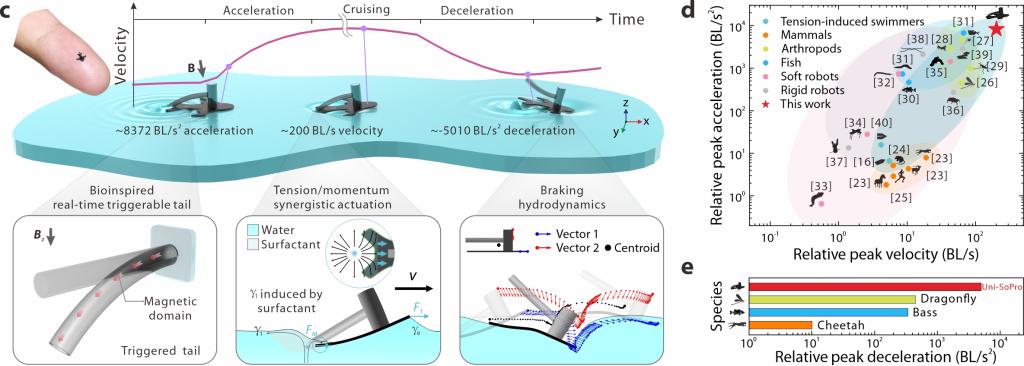
图3 昆虫尺度水面推进器及其超高的按需推进和刹车性能
通过跨尺度系统级仿生和人造结构的增强,研究团队解决了这个尺度基于表面张力梯度主导的水面推进器难以多次实时按需运动的难题,实现了综合运动性能几个量级的突破。综合运动性能指标CKPI: 1.6×106BL2/s3和减加速度~-5,010 BL/s2)。
研究团队通过对其推进和制动过程进行了水动力学建模和计算流体分析,解析了其通过姿态快速转变实现机器人动能衰减的原理,实现了其超越生物的超高减速度的制动行为,研究人员通过对推进过程进行解析和运动建模,可对其运动进行多段离散的运动规划,并且可以通过预编程的方式无任何碰撞的通过具有时间和空间约束的动态迷宫水域。
该研究得到了国基金基础科学中心项目“机器人化智能制造”(No. 52188102)的支持。
论文链接:https://www.nature.com/articles/s41467-024-45997-3
 微信公众号
微信公众号