
6月27日,《Science Advances》刊登了智能制造装备与技术全国重点实验室(简称“实验室”)丁汉院士、吴志刚教授团队与南洋理工大学、华中农业大学的合作科研成果,关于植物胁迫诊断的柔性可穿戴系统设计的最新研究论文“A machine-learning-powered spectral-dominant multimodal soft wearable system for long-term and early-stage diagnosis of plant stresses(面向植物胁迫长期及早期诊断的机器学习辅助下光谱主导型多模...
02 2025-07
6月24日,智能制造装备与技术全国重点实验室(简称“实验室”)丁汉院士团队在机器人领域顶级期刊《International Journal of Robotics Research》上刊登了关于机器人化智能制造的最新研究成果“A novel electromagnetic variable stiffness actuator for robotic grinding: Design, modeling, optimization, and control(用于机器人磨抛的新型电磁变刚度致动器:设计、建模、优化和控制)”。作为该期刊首次发表的“机器人顺...
01 2025-07
6月25日,《科学进展(Science Advances)》刊发智能制造装备与技术全国重点实验室(简称“实验室”)吴豪、尹周平教授团队在柔性电子领域的新成果,题为“A reusable hydrogel biosensor array with electrically responsive hydrogel interfaces for non-invasive locating of perforating arteries(电场响应型可重复使用水凝胶生物传感阵列用于无创穿支血管定位)”,我实验室2022级博士生杨淦光、2020级博士生仇裕淇为论文...
27 2025-06
5月13日,Nature旗下首个工程领域子刊《Communications Engineering》刊发智能制造装备与技术全国重点实验室(简称“实验室”)廖广兰教授团队在微流控稀有微粒富集方法领域的最新成果,题为“Integration of acoustic, optical, and electrical methods in picoliter droplet microfluidics for rare particles enrichment(皮升液滴微流控中声、光、电方法的集成用于稀有颗粒富集)”,提出了一种集成声、光、电方法的皮升级...
20 2025-05
5月12日,智能制造与装备全国重点实验室黄永安教授与澳门大学钟俊文助理教授合作,在《eScience》期刊(IF=42.9)上发表题为“Bio-inspired and programmable Marangoni motor for highly maneuverable and adaptable S-aquabots(可编程Marangoni马达驱动的高可控小型水面机器人)”的最新研究论文。小型机器人自主作业需具备可控机动性、环境适应性和智能感知能力,以应对复杂环境。但厘米级及以下机器人受能源与载荷限制,...
15 2025-05
近日,国际顶尖材料科学期刊《今日材料》(Materials Today)于4月21日在线刊发了一项关于剪切引导的人机交互柔性传感阵列的重磅研究成果。该成果论文题为 “Morphable 3D architectures enabled by shear - guided approach”(基于剪切引导方法实现可变形的3D结构),由华中科技大学、清华大学、西安交通大学与美国西北大学携手完成。其中,华中科技大学智能制造与装备全国重点实验室厉侃研究员,以及清华大学柔性电子技术国...
24 2025-04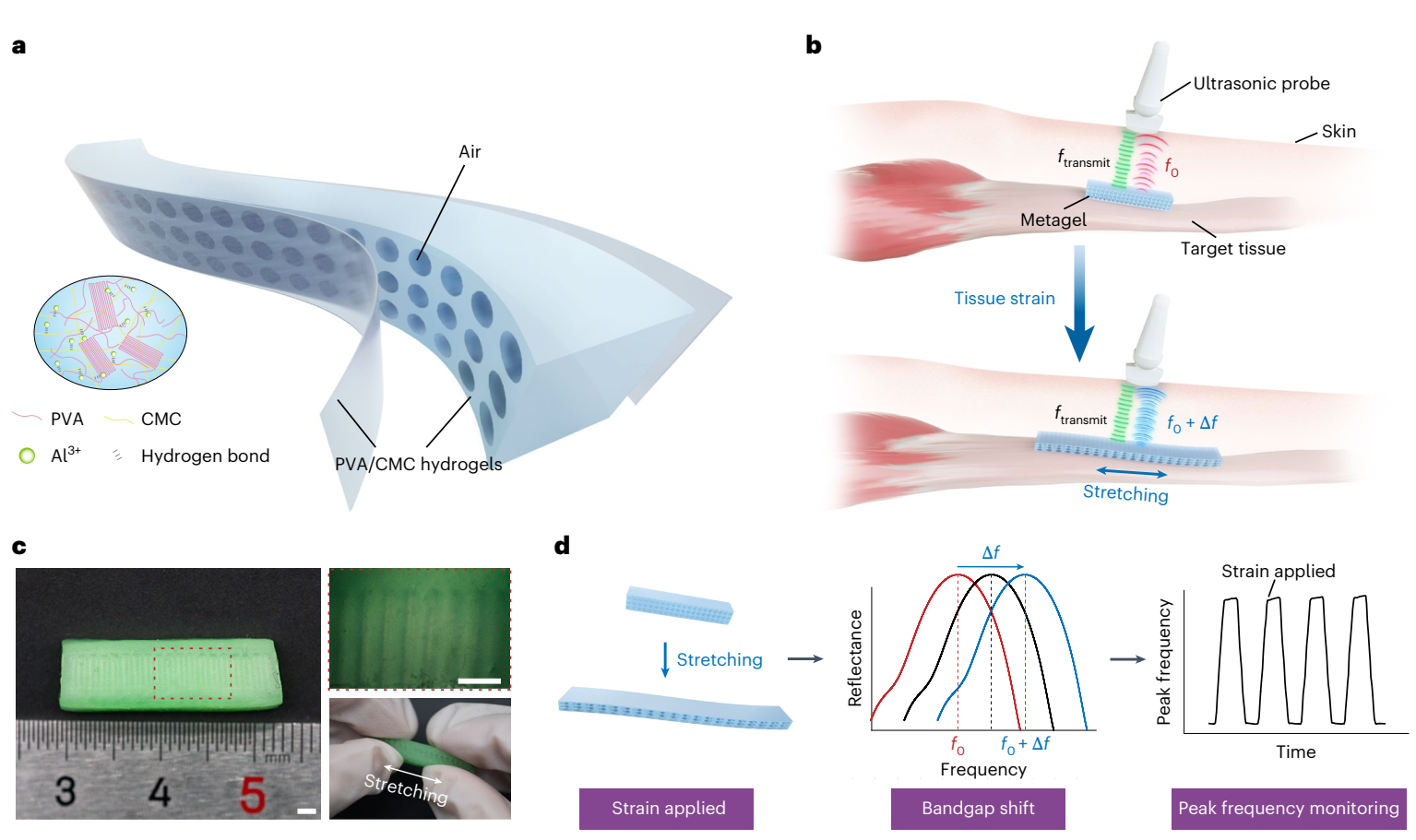
4月14日,生物医学工程领域国际顶级期刊《自然-生物医学工程》 (Nature Biomedical Engineering)上刊发智能制造装备与技术全国重点实验室(简称“实验室”)尹周平教授团队与集成电路学院臧剑锋教授团队合作新成果,题为“An implantable hydrogel-based phononic crystal for continuous and wireless monitoring of internal tissue strains(用于连续、无线监测内部组织应变的植入式水凝胶声波晶体)”。我实验室尹周平教...
23 2025-04
2月26日,机器人领域顶级期刊《International Journal of Robotics Research》(简称IJRR,年发文量80~90篇)刊登了智能制造装备与技术全国重点实验室(简称“实验室”)丁汉院士团队关于直接视觉伺服的最新研究论文成果“Direct visual servoing based on a new basis set and switching strategy (基于新基集和切换策略的直接视觉伺服)”。该成果耗时3年,双栏39页长文,被审稿人评价为“非常优雅的方法(quite elegant)”...
27 2025-02
5月10日,机器人领域权威期刊《国际机器人研究杂志》(International Journal of Robotics Research)在线刊发了我实验室丁汉院士团队关于全覆盖轨迹规划的最新研究成果“Spiral Complete Coverage Path Planning Based on Conformal Slit Mapping in Multi-connected Domains”(多连通域上基于共形狭缝映射的螺旋全覆盖轨迹规划)。论文受到期刊编辑Michael Otte博士的推荐。智能制造装备与技术全国重点实验室为论文唯一完成...
21 2024-05联系地址:湖北省武汉市洪山区珞喻路1037号机械工程学院东楼
联系电话:027-87559416
邮箱: imet@hust.edu.cn
邮编:430074
 微信公众号
微信公众号